|
|
| |
|
|
WERA(WavE RAdar)系統為一岸上雷達遠端海洋遙測系統(remote ocean sensing system)可用以監測海洋表面之海流(current)、波浪(wave)與風向(wind direction);此長距離範圍、高解析度監測系統採用短無線電波雷達技術(short radio wave radar technology), 垂直極化電磁波與導電性之海洋表面結合並跟隨地球曲線傳遞,如此可超越海洋水平面的雷達系統,可擷取布列格效應(Bragg Effect)之雷達迴波訊號(back-scattered signal)達200公里以上。
WERA岸上雷達遠端海洋遙測系統為一有效的海洋監測儀器系統,可提供海域大範圍可信賴的海洋資料;其安裝簡單具彈性的架構可應用於不同的海洋科學實驗與研究,如SAR與船舶交通服務。
|
| |
|
|
|
WERA(WavE RAdar)系統為岸上雷達遠端海洋遙測系統,利用超越海水平面(over-the-horizon)雷達技術,可監測海洋表面海流(current)、波浪(wave)與風向(wind direction),此長距離範圍、高解析度監測系統之無線電操作頻率介於5~50MHz之間;垂直極化電磁波與導電性之海洋表面結合並跟隨地球曲線傳遞,粗糙海洋表面與無線電波產生互制作用(interact),並因布列格效應(Bragg Effect)迴波訊號(back-scattered signal)可從超過200公里之遠處被偵測到;此效應於1955年首次由Crombie描述,而NOAA的Don Barrick於1977年採用此效應發展出第一套雷達遠端遙測系統。
布列格效應描述雷達電磁波迴波的放大效應(amplification Effect)為海洋波浪波長的兩倍;例如,30MHz雷達訊號波長10m其對應之海洋波浪波長為5m,由波浪反射回來的訊號將因放大效應而在接收訊號產生一個主要記號(dominant signature), 這個預期的記號為一個都普勒漂移訊號(Doppler Shifted Signal),由完成布列格條件的重力波速(Velocity of the gravity wave)給予一個特定的都普勒漂移量(Specific Doppler Shift),如圖1。 |
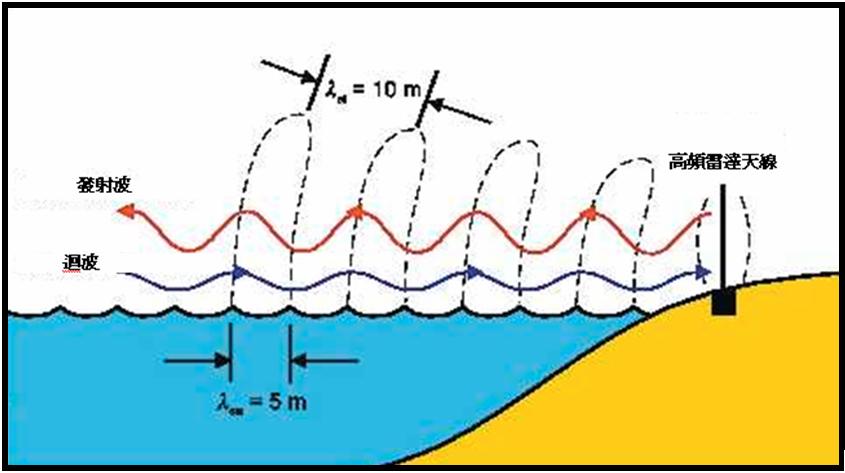 圖1:布列格效應操作原理
圖1:布列格效應操作原理
|
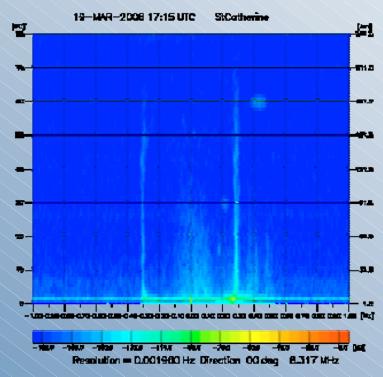
| 這些都普勒漂移訊號在海洋表面不移動時將圍繞正常化中心頻率對稱。一個海流在頻率域將這些布列格曲線上下漂移,此小頻率漂移即為用以計算每個單一格點(grid point)的海流流速資料。利用熟練的軟體,眾多有價值的資料可從這些頻譜產生,如海流繪圖、波浪頻譜繪圖與風向。此系統亦可發展風速量測與船舶追蹤(Ship tracking),如圖2說明。 |
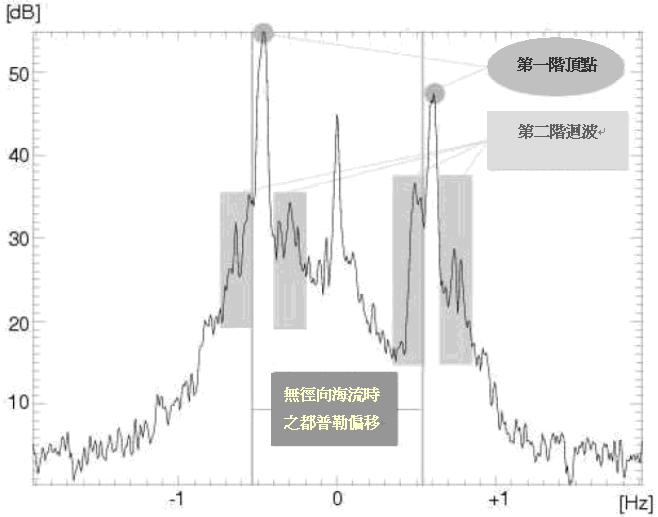 圖2:WERA系統一般頻譜,第一階布列格曲線輕微漂離中心,與第二階曲線重疊可得到波浪資料。
圖2:WERA系統一般頻譜,第一階布列格曲線輕微漂離中心,與第二階曲線重疊可得到波浪資料。
|
|
WERA雷達系統由德國漢堡大學Klaus-Werner Gurgel等人於1995發展出來;WERA系統的操作模式為調頻連續波模式(frequency modulated continuous wave mode , FMcw)。連續掃視無線電頻率訊號(rf-signals)發射後,其反射訊號與真實傳輸訊號比較會有一個頻率偏距(frequency offset),如此量測範圍即可以用頻率來編碼(encoded)。雷達連續發射非常低的無線電頻率功率(沒有gating與pulsing),其所需介於發射器與接收器之間的退耦(de-coupling),必須利用分離Rx與Tx天線位置來達成,這個結果一般是由兩組分開的天線排列來做場址幾何配置,如圖3所示。
|
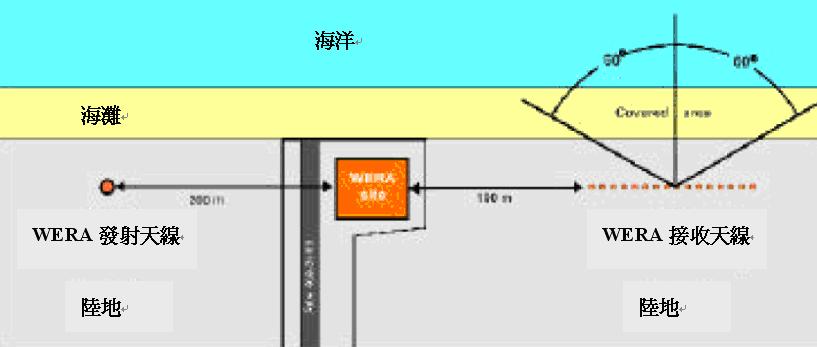 圖3:WERA場址幾何配置
圖3:WERA場址幾何配置
|
| |
接收器連續開機以擷取從所有預設範圍傳輸之訊號;這些類比訊號的處理將百分之百以同步(parallel)方式完成;並傳輸所有個別天線之振幅與相位資料至數位處理單元;這些系統因極低雜訊的FMcw操作模式可提供最佳的訊雜比。
方位角解析度由波束組成運算軟體(Beam Forming Algorithm)定義一般為1°,但準確度小於1°並與線性天線排列的長度有關(一般8支天線時15°,16支天線時3°),線性排列天線架構限制視野(field of view)為±60°。
另外一種系統架構為利用方向搜尋運算(Direction Finding Algorithm)與只有4支天線組成之成束接收天線,如此雖可得到360°的視野,但將減少角度的準確性;除外,第一階布列格曲線將變得較寬大,此乃因這個成束的較小接收天線有較寬大的焦距(focus)所致;如此第一階曲線將蓋過第二階布列格曲線去擷取波浪資料。當使用方向搜尋技術時,因第二階布列格曲線被第一階曲線覆蓋而模糊,因此其風險是相當高的。
完整的系統概念為具有非常大的彈性(flexible),可允許建置不同的架構,除外,硬體為模組化並具有寬帶(broadband),所以系統要修改為短距離或長距離量測均是可能的。
|
|

|
|
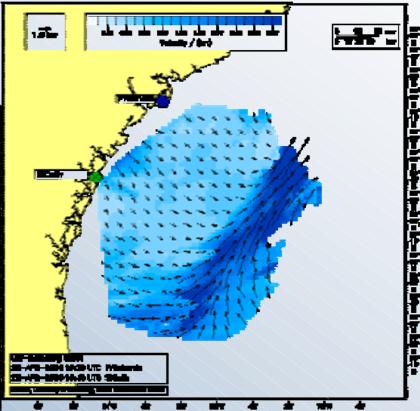
| WERA雷達遙測系統已安裝於世界各地,其量測之海流與波浪資料並與浮標量測資料比較並驗證有效。下圖為2000年2月於挪威海岸進行6個星期實驗所得到的海流與波浪資料。 |
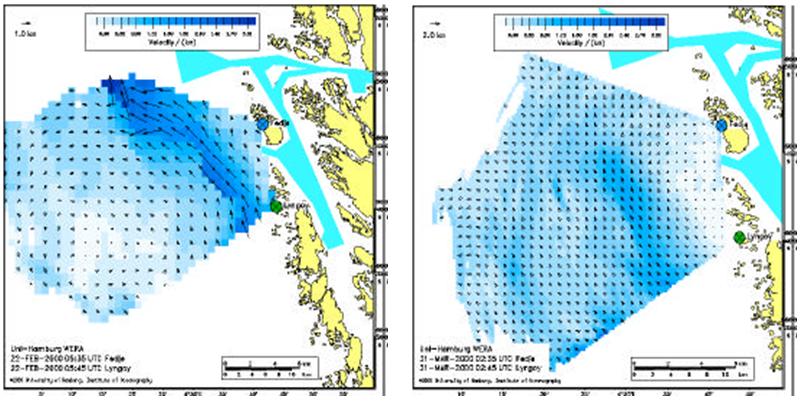 圖4:左圖-挪威海岸量測的表面流場(箭頭)1.4Km解析度。右圖-高解析度(300m)表面流場
圖4:左圖-挪威海岸量測的表面流場(箭頭)1.4Km解析度。右圖-高解析度(300m)表面流場
|
| |
在大西洋海岸靠近法國Brest進行2個月的實驗,得到很多有價值的海流、波浪與風以及船舶追蹤的資料。 |
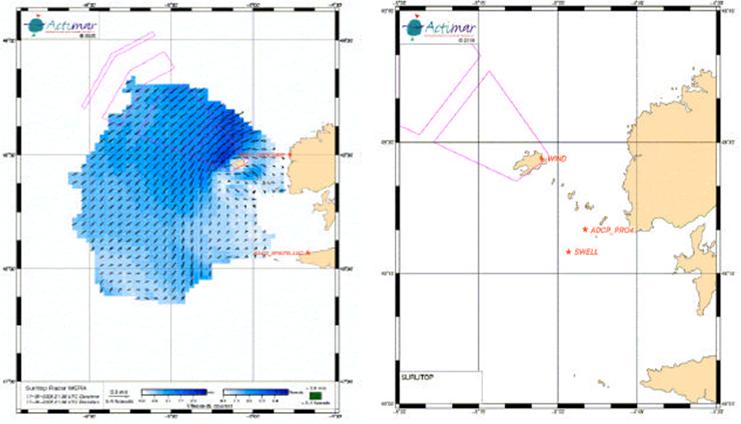 圖5:左圖-2005年SURLITOP實驗表面波場,每12分鐘一張圖。右圖-雷達數據驗証感應器位置
圖5:左圖-2005年SURLITOP實驗表面波場,每12分鐘一張圖。右圖-雷達數據驗証感應器位置 |
| |
為了驗証WERA系統,雷達視野(field of view)區域內佈放了一些資料浮標,ADCP與WERA海流數據相當的吻合。一些跳出的異常數據乃因實驗時漢堡大學實驗室借用的雷達系統電源失效與放大器損壞所引起。 |
| |
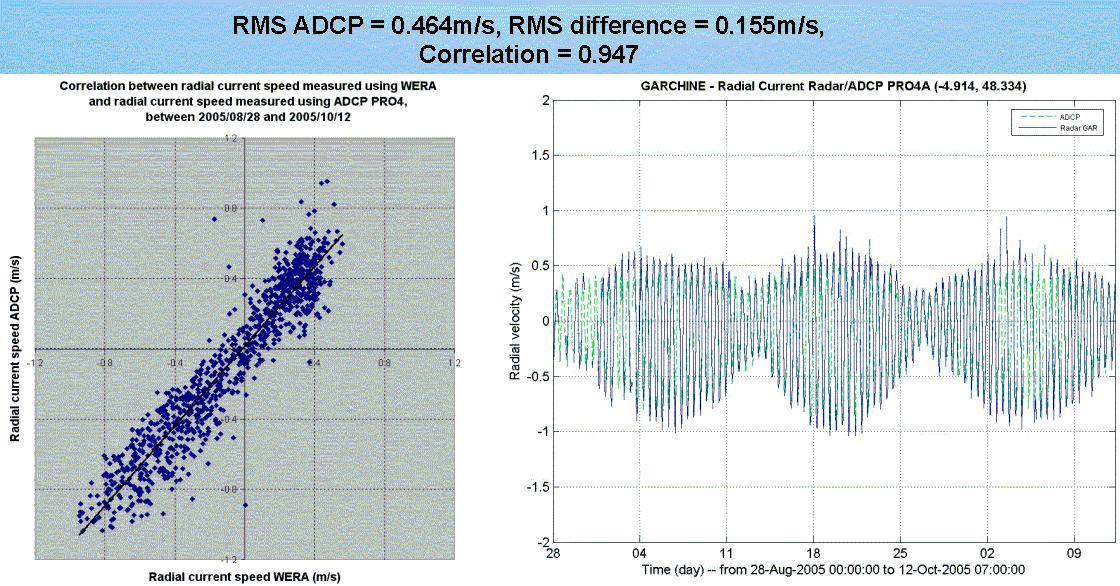
圖6:WERA與ADCP海流數據比較 |
| |
波浪量測資料為一個小時平均值以產生波浪繪圖,風向繪圖亦同。 |
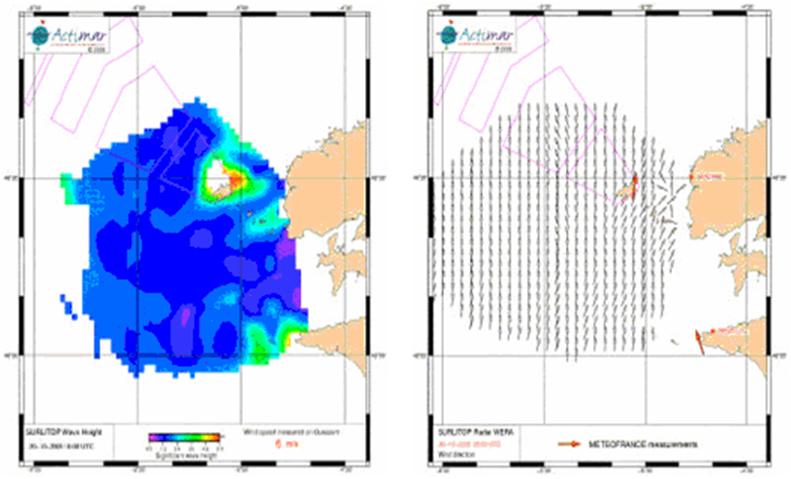 圖7:左圖-示性波高圖一小時平均。右圖-風向圖一小時平均
圖7:左圖-示性波高圖一小時平均。右圖-風向圖一小時平均 |
| |
波浪量測採用第二階布列格曲線,這些曲線的振幅較小,因此波浪量測範圍一般減為海流量測範圍的50%;圖8為波浪量測數據比較圖,說明在較高海洋狀況時其不確定性將增加。這些波浪資料是由漢堡大學的軟體產生;另外方向波譜(directional wave spectra)已由Seaview Sensing公司發展出來,適用於WERA雷達遙測系統。 |
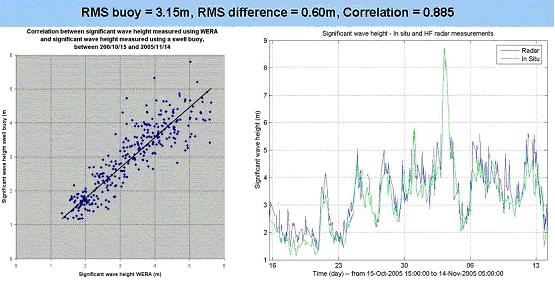 圖8.:WERA與RMS資料浮標示性波高比較圖
圖8.:WERA與RMS資料浮標示性波高比較圖 |
| |
風向量測,一段採用平衡(in-balance)的第一階布列格曲線,其量測範圍與海流流場相近,參考圖7右圖。在高風速狀況時,其結果相當良好,參考圖9。 |
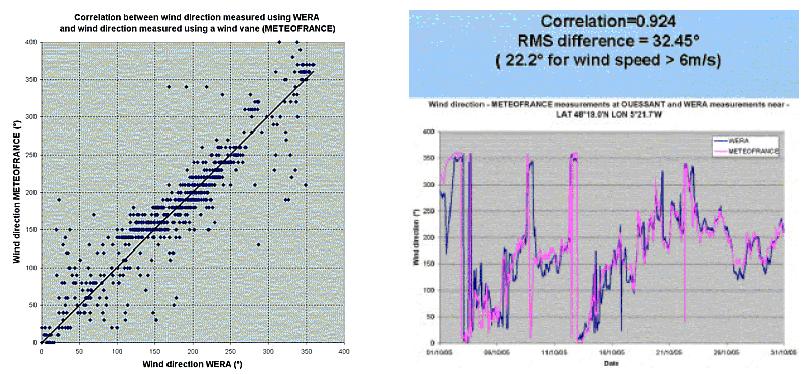
圖9:WERA與風向計量測數據比較表
|
|
|
| ERA遠端海洋遙測系統之應用,必須考慮一些物理、海洋與技術參數,以定義出最佳的場址幾何配置(site geometry)與系統架構(system configuration),以使用者觀點而論主要有下列參數: |
1.範圍: 量測範圍由操作頻率決定,越低頻量測範圍愈長。
‧較低頻道將對外部干擾愈敏感。
‧較低頻率將增加量測範圍的變化(白天至晚上)。
‧較低頻率其可用帶寬(bandwidth)將減少,因此其解析度較差。
‧較低頻率其對應的布列格波長較長(如8Mhz→Bragg wave=19m).
‧較低頻率時線性天線排列將較長。
‧量測範圍受鹽度(salinity)影響;較低鹽度將大大減少量測範圍。
2.
範圍解析度: 量測解析度由帶寬大小決定。
‧增加帶寬,受外部干擾的風險將增加。
‧增加帶寬,將增加產生的資料數據。
3.視野(Field of view):
‧在線性排列架構下,其視野限制在±60°,其排列必須與海岸線近乎平行。
4.場址幾何配置:
‧對任何WERA場址配置,其發射與接收天線必須至少相離150公尺以上,最好線性接收排列與發射排列能恰好
為一直線。天線排列應儘可能接近海水面(<300公尺)或安裝在一峭壁上。若有一似峭壁的位置,亦可將天線配
置為垂直方向的分離;如發射天線排列安裝在下坡處於接收天線排列之前。
|
|
|