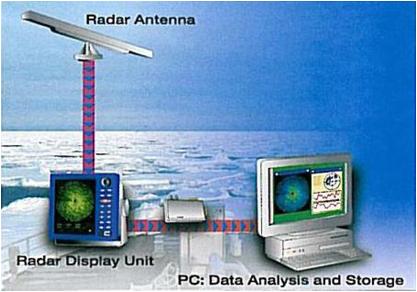
為了推導波浪及表面流資訊,順序擷取雷達影像畫面。資料分析依照列敘述實行:
1.雷達影像部份:
為了波浪分析從全部雷達影像中切取界定數量的矩形部份,然後轉換成笛卡兒(Cartesian)座標。一個標準笛卡兒影像涵蓋2平方公里區域。
2.分離傅立葉(Fourier)轉換:
由離散傅立葉的轉換,連續之雷達影像部分轉換成3D影像頻譜。
3.表面流的計算:
表面海流可由縮減3D影像頻譜(3D-image
spectrum)中的光譜能量(Spectral
energy)的位置與線性表面重力波定義之散亂關系的理論位置之距離獲得。準確地決定表面流是從雷達影像計算方向性波頻譜基本步驟。
4. 3D影像頻譜濾波:
頻譜:結合海洋波浪的能量,利用如帶通濾波器之散亂關系,可從背景雜訊中分離出來。
5. 2D波頻:
波譜:為導出2D波譜,在頻率域中將3D影像波譜積分;利用調節轉換函數(Modulation
Transfer Function, MTF)獲得2D波數頻譜(2D-wave
number spectrum)。
6.方向波譜的計算:
2D波數頻譜轉換成為頻率-方向波譜乃利用散亂關系(dispersionrelation)來完成
7. 1D頻譜計算:
方向積分可產生1D頻譜,隨而導出所有海況參數。
8.示性波高的預估:
示性波高(Significant
wave height)與雷達影像中的訊雜比
(Signal to
noise ratio)有關;內部運算功能可檢核其有效性與處理參數的微調;若多風天氣的參考資料可使用,將可得到最佳的結果。